1.系统硬件
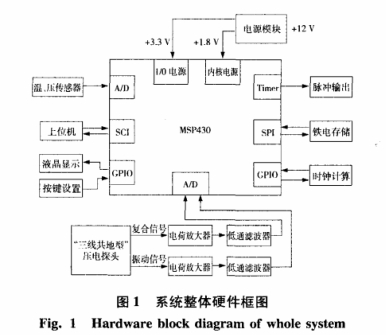
涡街流量计系统的整体硬件结构见图1。整体硬件结构可以分为以下几个部分:检测复合信号和振动信号的“三线共地型”压电探头传感器以及后续处理电路;为系统各模块提供电源的电源电路;压力传感器的温度、压力检测电路及后续调理电路;上、下位机通讯的SCI通讯模块电路;各种现场实时参数显示的液晶显示电路;各种掉电数据保存的铁电存储FRAM电路;掉电时间计算的DS1302时间电路;现场用户翻页选择的按键输人电路以及脉冲输出电路;采用MSP430单片机的微处理器。
2.非线性仪表系数修正
随着工业技术的发展和进步,对宽量程、高精度涡街流量计的需求日渐迫切,各种仪表系数非线性修正方法和应用相继出现。最早出现的是采用硬件电路进行修正。该方法稳定可靠,但只适用于单调上升(或下降)的曲线形状!5]。由于电子技术特别是单片机技术的迅猛发展,这一问题得到了更好的解决。由实际标定的结果可以回归为仪表系数与频率函数关系式,并将表达式存人单片机系统的程序存储器中。测量传感器信号频率,根据函数表达式计算出此时的仪表系数,从而实现仪表非线性修正。相关公式如下:
平均仪表系数`K:
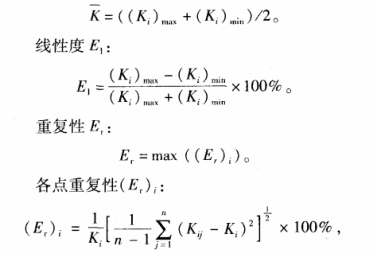
式中:Kij一第i个检测点第j次检测的仪表系数。修正方法的实现过程:
(1)通过水流量标准装置测量K-Qv曲线中的特征点。每个流量点测量三次,相同时间t内每次脉冲为N1、N2和N3计算频率后,采用三次样条[6)拟合,绘制K-Qv特征曲线。理论上测量点越多越准确。频率计算式为ƒ=(N1+N2+N3)/3t。(2)计算涡街流量计特征曲线的平均值K,按精度要求计算Kmin和Kmax。对于气体涡街流量计,线性误差E1=0.015。所以,Kmin=K-KE1/2,Kmax=K+KE1/2。
(3)计算需要修正的频率段。在待修正频率段内选择步长t=0.015Hz,每隔l计算K,每-一个ƒi对应一个Ki。由ƒi/Ki=ƒimin/Knin=fimax/Kmax=qvi计算每个ƒi将被修正成的ƒimax和ƒimin。.
(4)将有交集的ƒimax-ƒimin合并,即将相邻ƒi都修正为同一个ƒi。ƒj只要在ƒimax和ƒimin之间就能够满足线性度要求,从而完成优化。 |